计算机图形学
第三章(2) 变换
从“静”到“动”
- 如何准确地告诉GPU,让这个静止的正方形动起来?
- 如何用数学和代码精确地描述它的运动变化?
第二部分:基础变换
本部分内容:
- 旋转
- 缩放
- 平移
课程目标
- 解释 2D平移、旋转和缩放变换的几何意义
- 推导 并 写出 2D旋转和缩放的2x2矩阵
- 阐明 平移变换的特殊性,以及为何需要统一的表示方法
- 解释 齐次坐标的定义及其在图形学中的核心作用
- 使用 3x3的齐次矩阵来统一表示2D变换
一个问题:统一表示
我们已经知道,2D空间中有三种基本变换:
- 旋转
- 平移
- 缩放
都能统一用矩阵和向量的计算表示,如何表示?
变换的概念
变换,指的是建立点与点或向量与向量之间的映射,如下图中所示,有映射关系$v=T(u)$,$Q=T(P)$
仿射变换
仿射变换,能够维持物体的线性属性,其中包含了物理上的重要的变换,如
- 刚性变换(Rigid-body transformation):包括旋转(Rotation)、平移(Translation)
- 非刚性变换(Non-rigid transformation):缩放(Scaling)、错切(Shear)
在计算机图形学中,仿射变换是非常重要的,仿射变换能保持拓扑结构不变,即点、线、面之间的相对关系保持不变
仿射变换流水线实现
旋转
考虑由上述四点构成的正四边形,若要实现按角速度$\theta$绕原点逆时针旋转的动画效果
即求点$P(x,y)$旋转$\theta$度后的新坐标$P'(x',y')$
推导过程
核心工具是,三角函数
- 首先,用极坐标表示点 $P(x, y)$。设OP长度为 $r$,初始角度为 $\alpha$
- 则有 \[ \begin{cases} x=r\cos{\alpha}\\ y=r\sin{\alpha} \end{cases} \]
- 绕原点逆时针旋转$\theta$角度后,新点$P'$的角度变为$(\alpha + \theta)$,半径 $r$ 不变
- 因此有: \[ \begin{cases} x'=r\cos{(\alpha + \theta)}\\ y'=r\sin{(\alpha + \theta)} \end{cases} \]
- 接下来,我们需要展开这两个和角公式...
推导过程续
- 根据和角公式,有: \[ \begin{cases} \cos{(\alpha + \theta)}=\cos{\alpha}\cos{\theta}-\sin{\alpha}\sin{\theta}\\ \sin{(\alpha + \theta)}=\sin{\alpha}\cos{\theta}+\cos{\alpha}\sin{\theta} \end{cases} \]
- 将其代入$x',y'$的表达式,得到: \[ \begin{cases} x'=r\cos{(\alpha + \theta)}=r\cos{\alpha}\cos{\theta}-r\sin{\alpha}\sin{\theta}\\ y'=r\sin{(\alpha + \theta)}=r\sin{\alpha}\cos{\theta}+r\cos{\alpha}\sin{\theta} \end{cases} \]
- 回忆一下,$x=r\cos{\alpha}$,$y=r\sin{\alpha}$,将其代入上式,得到: \[ \begin{cases} x'=x\cos{\theta}-y\sin{\theta}\\ y'=x\sin{\theta}+y\cos{\theta} \end{cases} \]
推导过程续(2)
- 将上式改写成矩阵形式: \[ \begin{bmatrix} x'\\y' \end{bmatrix}= \begin{bmatrix} \cos{\theta} & -\sin{\theta}\\ \sin{\theta} & \cos{\theta} \end{bmatrix} \begin{bmatrix} x\\y \end{bmatrix} \]
该矩阵即为在二维平面点$P$绕原点逆时针旋转$\theta$度的旋转矩阵
旋转矩阵可视化
控制与公式
新坐标 x' 的推导:
$x' = r \cos(\alpha + \theta) = r\cos\alpha\cos\theta - r\sin\alpha\sin\theta$
$x' = x \cdot \cos\theta - y \cdot \sin\theta$
新坐标 y' 的推导:
$y' = r \sin(\alpha + \theta) = r\sin\alpha\cos\theta + r\cos\alpha\sin\theta$
$y' = x \cdot \sin\theta + y \cdot \cos\theta$
缩放
如何让一个点 $P(x, y)$,以原点为中心,在水平方向上放大 $S_x$ 倍,在垂直方向上放大 $S_y$ 倍,得到新的坐标 $P'(x', y')$?
推导过程
缩放的逻辑非常直接:
- 新的x坐标 $x'$ 是旧的x坐标 $x$ 乘以水平缩放因子 $S_x$
- $x' = S_x x$
- 同理,新的y坐标 $y'$ 是旧的y坐标 $y$ 乘以垂直缩放因子 $S_y$
- $y' = S_y y$
- 这两个简单的方程就是缩放变换的核心!
推导过程续
- 将上面两个方程合并: \[ \begin{cases} x' = S_x x\\ y' = S_y y \end{cases} \]
- 为了统一成矩阵形式,我们可以将它们看作是 $x$ 和 $y$ 的线性组合,其中一些系数为0 \[ \begin{cases} x' = S_x x + {\color{gray}0 \cdot y}\\ y' = {\color{gray}0 \cdot x} + S_y y \end{cases} \]
- 将上式改写成矩阵形式: \[ \begin{bmatrix} x'\\y' \end{bmatrix}= \begin{bmatrix} S_x & 0\\ 0 & S_y \end{bmatrix} \begin{bmatrix} x\\y \end{bmatrix} \]
该矩阵即为在二维平面点$P$以原点为中心按比例$S_x$和$S_y$缩放的缩放矩阵
缩放矩阵可视化
控制与公式
新坐标推导:
$x' = S_x \cdot x$
$y' = S_y \cdot y$
平移
如何将一个点$P(x,y)$平移一段固定的距离$(t_x,t_y)$,到达新的位置$P'(x',y')$?
用数学表达
从数学上看,平移是最简单的操作,就是坐标的加法:
\[ \begin{cases} x' = x + t_x \\ y' = y + t_y \end{cases} \]
问题来了:能像旋转和缩放一样,用一个$2\times 2$的矩阵来表示这个加法操作吗?
\[ \begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} \]
$2\times 2$矩阵的局限性
如果能构建矩阵,则有
\[ \begin{cases} x'=ax+by\\ y'=cx+dy \end{cases} \]
会发现,无论如何选择$a,b,c,d$,都无法制造出一个独立的加法项$t_x$或$t_y$
核心原因:$2\times 2$矩阵只能表示相对原点不变的线性变换,包括旋转、缩放和错切等。而平移是一种
使用齐次坐标和齐次矩阵
为了表示平移,需要扩展表示的维度,使用齐次坐标表示点,并使用齐次矩阵表示平移
$$ P(x,y)\Rightarrow P_h(x,y,{\color{red}1} )$$
计算$3\times 3$矩阵
目标是,找到一个$3\times 3$的矩阵,满足
\[ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} ? & ? & ? \\ ? & ? & ? \\ ? & ? & ? \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} \]
计算后满足
\[ \begin{cases} x' = x + t_x \\ y' = y + t_y \\ 1 = 1 \end{cases} \]
计算$3\times 3$矩阵
根据矩阵乘法计算规则展开,可以得到
- \[ x'=?x+?y+?1={\color{red}1}\cdot x + {\color{red}0}\cdot y + {\color{red}t_x}\cdot 1 \]
- \[ y'=?x+?y+?1={\color{red}0}\cdot x + {\color{red}1}\cdot y + {\color{red}t_y}\cdot 1 \]
- \[ 1=?x+?y+?1={\color{red}0}\cdot x + {\color{red}0}\cdot y + {\color{red}1}\cdot 1 \]
齐次平移矩阵
因此,齐次平移矩阵为
\[ M=\begin{bmatrix} 1 & 0 & {\color{red}t_x} \\ 0 & 1 & {\color{blue}t_y} \\ 0 & 0 & 1 \end{bmatrix} \]
\[ \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} =\begin{bmatrix} x+x_t\\ y+y_t\\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & {\color{red}t_x} \\ 0 & 1 & {\color{blue}t_y} \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} \]
观察平移矩阵的结构,可以发现
- 平移矩阵的左上角为$2\times 2$的单位矩阵,保证坐标系的不变性
- 最后一列前两项$(t_x, t_y)$为平移的距离
平移矩阵可视化
控制与公式
三种变换矩阵
到目前为止的三种基本变换矩阵分别对应:
缩放变换($2\times 2$)
\[ \begin{bmatrix} s_x & 0 \\ 0 & s_y \end{bmatrix} \]
旋转变换($2\times 2$)
\[\begin{bmatrix} \cos \theta & -\sin \theta\\ \sin \theta & \cos \theta \end{bmatrix}\]
平移变换($3\times 3$)
\[\begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix}\]
是否可以将旋转和缩放也“升级”到$3\times 3$矩阵呢?
核心思想:使用齐次坐标和齐次矩阵的概念,将 $2\times 2$ 的线性变换矩阵嵌入到 $3\times 3$ 的矩阵中
缩放矩阵
将$2\times 2$的缩放矩阵变成$3\times 3$的齐次矩阵有:
\[ \begin{bmatrix} x'\\ y'\\ 1 \end{bmatrix} = \begin{bmatrix} s_x & 0 & ? \\ 0 & s_y & ? \\ ? & ? & ? \end{bmatrix} \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} \]
将矩阵展开后求解,可得到:
\[ M=\begin{bmatrix} s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
旋转矩阵
将$2\times 2$的旋转矩阵变成$3\times 3$的齐次矩阵有:
\[ \begin{bmatrix} x'\\ y'\\ 1 \end{bmatrix} = \begin{bmatrix} \cos \theta & -\sin \theta & ? \\ \sin \theta & \cos \theta & ? \\ ? & ? & ? \end{bmatrix} \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} \]
将矩阵展开后求解,可得到:
\[ M=\begin{bmatrix} \cos \theta & -\sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
齐次矩阵统一表示
现在我们有了三种基本变换的齐次矩阵表示:
缩放变换($3\times 3$)
\[ S_{(s_x, s_y)}=\begin{bmatrix} s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
旋转变换($3\times 3$)
\[ R_{(\theta)}=\begin{bmatrix} \cos \theta & -\sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{bmatrix}\]
平移变换($3\times 3$)
\[ T_{(t_x, t_y)}=\begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix}\]
变换可视化
1. 添加新变换
2. 变换序列 (可拖拽排序)
3. 最终复合矩阵 M = M_n * ... * M_1
三维空间的变换
三维空间中的变换与二维空间类似,只是多了z轴的变换。
平移
空间中,将一个点$P(x,y,z)$移动到新的点位置$P'(x',y',z')$,位移向量为$(t_x, t_y, t_z)$,即有
\[ \begin{cases} x' = x + t_x \\ y' = y + t_y \\ z' = z + t_z \end{cases} \]
三维空间的变换
平移对应的变换矩阵记为$T$,有$P'=TP$, 其中,$T$为
\[ T(t_x, t_y, t_z) = \begin{bmatrix} 1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \]
三维空间的变换
缩放
三维空间中,沿着三条轴的方向改变对象的大小,假设在三条轴方向上缩放系数分别为$s_x, s_y, s_z$,其表达式可写成
\[ \begin{cases} x' = s_x \cdot x \\ y' = s_y \cdot y \\ z' = s_z \cdot z \end{cases} \]
缩放对应的变换矩阵记为$S$,有$P'=SP$, 其中,$S$为
\[ S(s_x, s_y, s_z) = \begin{bmatrix} s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0 \\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \]
三维空间的变换
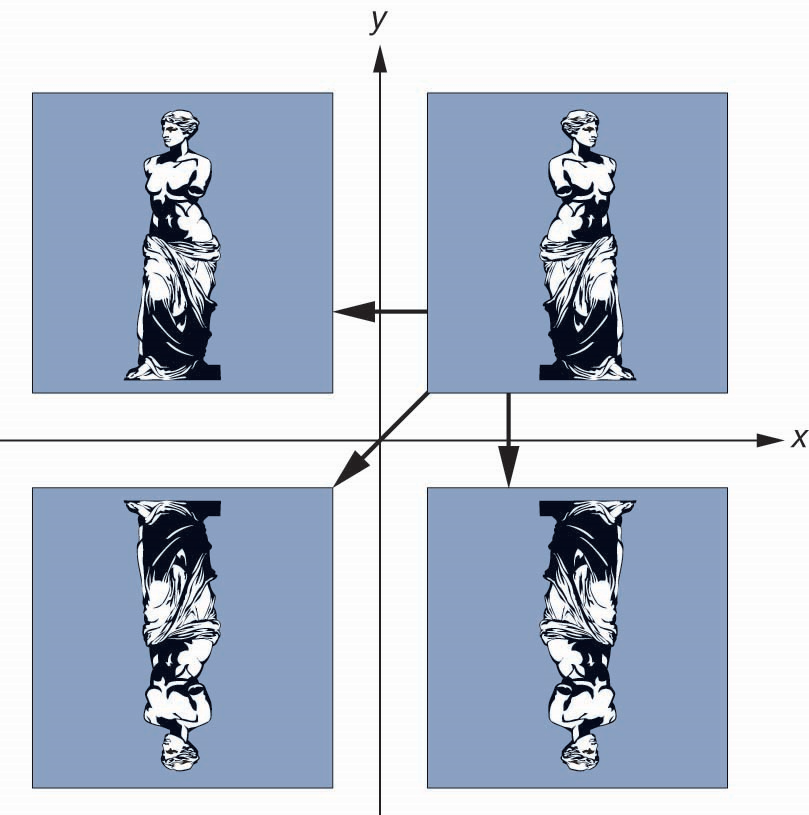
反射可视作是特殊的缩放
\[ \begin{cases} s_x=1, s_y=1\\ s_x=-1, s_y=1\\ s_x=-1, s_y=-1\\ s_x=1, s_y=-1 \end{cases} \]
三维空间的变换
旋转
三维空间中,旋转定义为绕特定坐标轴的转动
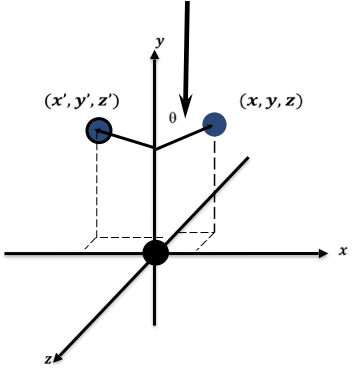
绕$Z$轴旋转$\theta$角,保持点坐标的$Z$分量不变
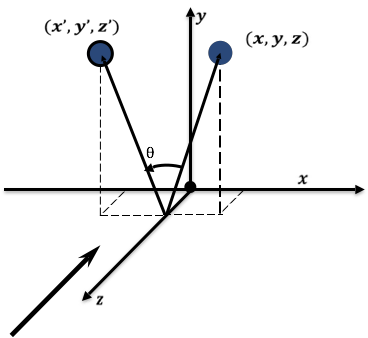
三维空间的变换
点$(x,y,z)$绕$Z$轴逆时针(正向)旋转$\theta$角度,相当于是点在$XOY$平面绕原点旋转在三维空间的扩展,有
\[ \begin{cases} x' = x \cdot \cos \theta - y \cdot \sin \theta \\ y' = x \cdot \sin \theta + y \cdot \cos \theta \\ z' = z \end{cases} \]
对应的齐次旋转变换矩阵记为$R_{Z}(\theta)$,有$P'=R_{Z}(\theta)P$, 其中,$R_{Z}(\theta)$为
\[ R_{Z}(\theta) = \begin{bmatrix} \cos \theta & -\sin \theta & 0 & 0 \\ \sin \theta & \cos \theta & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \]
三维空间的变换
相应的,绕$X$轴和$Y$轴正向分别旋转$\theta$角度,保持相应的分量值不变
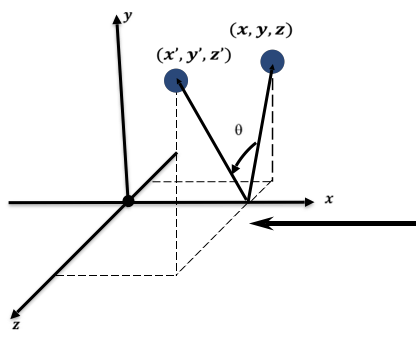
三维空间的变换
利用与$Z$轴相同的方式,可推导得到绕$X$轴和$Y$轴旋转的齐次坐标矩阵表示分别为:
\[ R_X(\theta)=\begin{bmatrix} 1&0&0&0\\ 0&\cos{\theta}&-\sin{\theta}&0\\ 0&\sin{\theta}&\cos{\theta}&0\\ 0&0&0&1 \end{bmatrix} \]
\[ R_Y(\theta)=\begin{bmatrix} \cos{\theta}&0&\sin{\theta}&0\\ 0&1&0&0\\ -\sin{\theta}&0&\cos{\theta}&0\\ 0&0&0&1 \end{bmatrix} \]
绕任意点的旋转
思考,如何实现绕任意点的旋转?